2025年02月27日 15:23
ダイナミックマッププラットフォームと中部国際空港は、高精度3次元地図データ(HDマップ)を搭載した自動運転車両の実証実験を、3月9日から開始する。
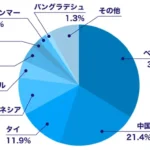
ダイナミックマッププラットフォームは、経済産業省による「公共エリア向けダイナミックマップの開発」の研究開発事業を2023年11月より受託している。空港内で様々な自律移動モビリティが安全かつ効率的に運行するには、車両の停止場所・退避場所、航空機が走行する経路との合流地点における優先走行順など、カメラやセンサーのみでは認識できない情報を含むHDマップが必要。本事業では、こうしたHDマップに他車両の動態情報等の外部情報を掛け合わせたダイナミックマップの開発・活用を通して、新たなモビリティ社会の実現を目指す。
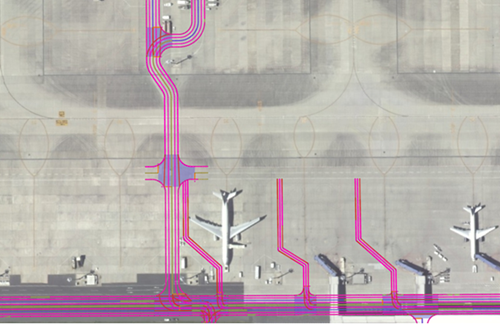
実証実験では、ティアフォーが運行する自動運転EVバス「Minibus」にダイナミックマッププラットフォームのHDマップを搭載。中部国際空港セントレアの制限区域内にて、トーイングトラクターおよび旅客バスを想定した2つのルートを自動運転レベル2相当で走行することで、HDマップによる基本走行の確認を実施する。ルートには航空機が駐機するためのスポットやサービスレーン等が含まれており、より実装時に近い環境での実証となる。
本実証実験は、本事業にて開発した空港制限区域向けHDマップを使用した初の自動運転走行の場。まずは自動運転レベル2の実証から開始し、将来的に自動運転レベル4の実現を目指す。