2020年04月07日 12:21
イクシスと安藤ハザマは、「自律走行式ひび割れ検査ロボット」を開発した。
大空間構造物の床面施工におけるコンクリートのひび割れ不具合は、竣工時や引渡し後一定期間が経過したのちに検査が必要だ。材料の配合調整等によりひび割れの発生は減少傾向にあるものの、これまでの検査方法では、必要な知識を有する検査員が近接目視で実測を行い、その結果を写真やスケッチで記録するため、一連の検査業務に多くの時間がかかっている。近年、画像認識によるひび割れ検出技術が開発されているが、その多くは人手をともなう画像取得作業が必要。さらに取得した画像はその解像度の高さからデータが重く、ひび割れ検出から記録書類の作成に相当の時間を要しており、作業の効率化が求められる。
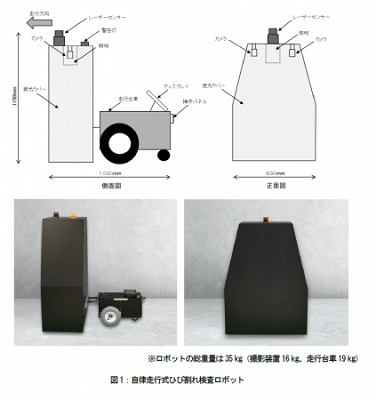
今回開発した検査ロボットは、検査の自動化および記録書類作成作業の削減により検査業務の大幅な効率化(従来の近接目視と比較して約40%の時間短縮)を実現するもの。大空間構造物の床面におけるひび割れ検査において、軽量な走行台車型の検査ロボットが自律走行、自動撮影をおこない、同時にAI(人工知能)により撮影画像からひび割れを検出し、その結果を自動で図面に表示する。
実機試験において検査ロボットで自動検出したひび割れ箇所と、近接目視で実測したひび割れ箇所を比較したところ、幅0.1mm以上のひび割れに対し、適合率が90%以上となることが確認できた。今後は、この検査ロボットに更なる改良を加え、様々な大空間構造物の工事現場に導入し、検査業務の効率化による生産性向上を目指す。